来源:中国产业新闻网 2026-05-24 21:18:09
机器狗巡检,真正难的不是“装一个摄像头”,也不是“让云台自己稳住”。真正难的是:当机器狗在真实场景中行走、转弯、上下坡、跨越障碍、经过碎石路面和狭窄通道时,整套系统还能不能持续输出稳定、清晰、可识别、可复现的巡检数据。
近日,云深处科技四足机器人巡视系统稳定性全面升级,围绕机器狗动态巡检场景,对机器狗运动控制、云台自稳定系统、载荷减振结构、预置点复位算法、可见光与热成像采集链路进行协同优化。从普通T型云台方案,到机器狗背载三轴抗振自稳定巡检系统,云深处科技四足机器人巡视系统升级的核心只有一个:让机器狗在运动中依然稳定感知。
全新方案
传统方案
从采集到输出四层协同 系统稳定性全面升级
机器狗运动控制协同。机器狗是云台的移动底座,底座越稳定,云台补偿压力越小。升级方案中,系统可根据巡检任务实时调控机器狗的行进速度、转向停靠及机身姿态,减少急停、急转和大幅晃动带来的画面冲击。关键检测点位,机身姿态与云台角度同步校准锁定,有效规避晃动干扰,保障仪表读数、设备测温、缺陷识别等作业获得稳定清晰的图像。

载荷结构减振缓冲。低频姿态变化,足端冲击、地面不平整等引起的高频振动如果直接传递至云台,再强的电子补偿也会承受较大压力。为此,云深处科技四足机器人自稳定云台配备硬质硅胶减振底座,相比传统软质减振垫或钢丝绳结构,具备高抗振、低反弹特性,能有效吸收高频振动、减少二次回弹,使云台更快进入稳定状态。这是运动平台与稳定云台之间的关键缓冲层。
三轴结构解决偏移难题。坡道、台阶、碎石路面及窄幅转向等复杂场景,机器狗行进中易出现俯仰、横滚、偏航等姿态偏移,导致观测视角偏移。云深处科技四足机器人巡视系统稳定性全面升级后,配套迭代云台稳定体系,全新搭载三轴机械自稳定结构,针对性破解复杂路况下的姿态偏移难题。升级后的系统可持续抵消机身姿态波动带来的画面干扰,保持观测视角平稳。同时,云台内置定制大扭力电机与高精度传感器,可实时感知抖动幅度并驱动电机完成动态反向补偿。

新方案极限路况录屏

旧方案极限路况录屏
巡检算法闭环校准。电力巡检过程中,机器狗重复性巡检同一条路线、同一批设备、同一个测温点。若云台长期运行出现角度偏移,会导致预置位不准、识别偏差、测温区域偏移等问题。云深处科技四足机器人升级后的自稳定系统支持编码云台闭环控制,可针对外力影响下的云台偏移进行自动矫正,减少空回、失步和长期机械误差。同时,系统内置偏移自校正算法,可面向机器狗大量预置点的长期巡检模式,实现更稳定的复位能力。
多维场景适配 构建智能巡检完整作业闭环
针对室外变电站设备分散、温差波动大、路况复杂,以及室内配电间空间狭窄、光照不足、设备密集等差异化工况,还优化完善了读表、测温、识别、判断、追溯等一系列电力巡检核心作业能力。
云深处科技四足机器人可以完成复杂区域的灵活通行与点位抵达,运动控制算法可削弱环境扰动对数据采集的干扰,三轴自稳定云台全程保障成像平稳,可见光与热成像模块实现多维度感知采集,预置位算法持续维持长期巡检点位的一致性。云深处科技四足机器人的所有采集数据,汇总至后台智能分析系统,完成运算研判与结果输出,构建起完整的巡检作业闭环,能够满足各类复杂场景下常态化、高精度巡检作业需求。
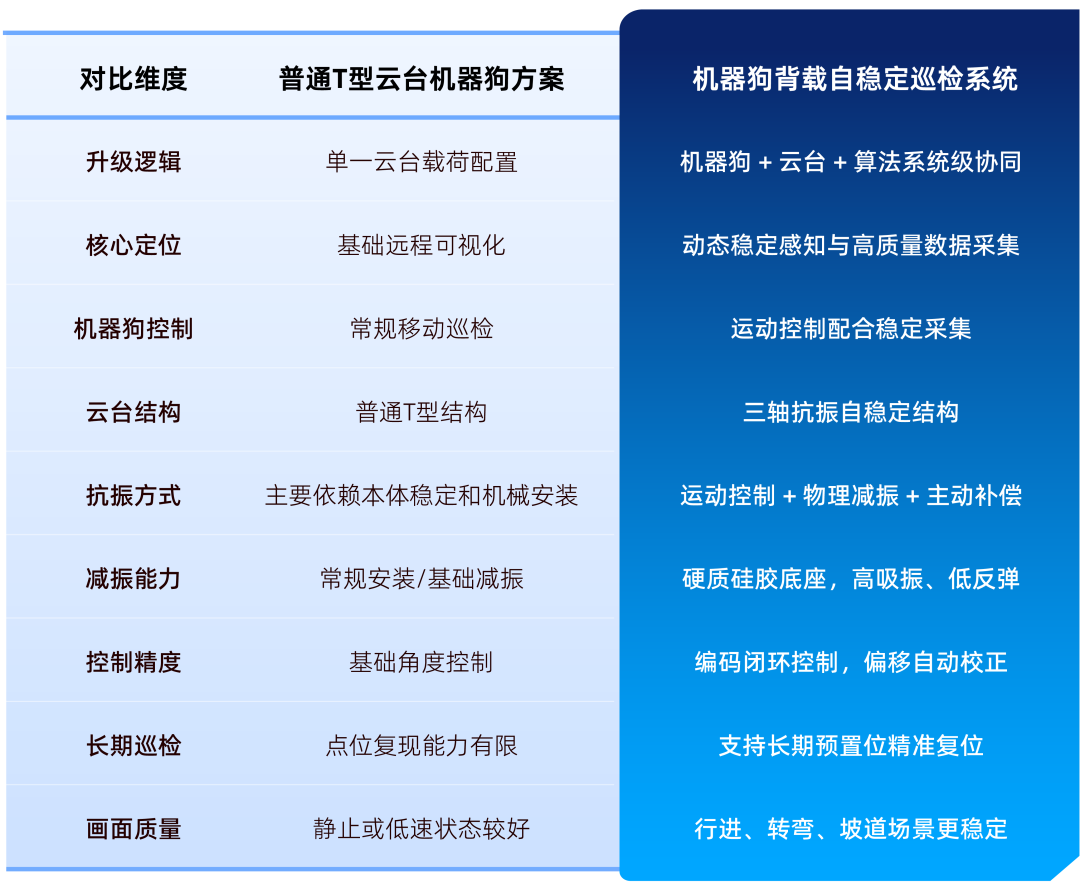
多维度升级 新旧系统对比
未来,云深处科技将持续深耕各类巡检场景,不断迭代产品性能,以成熟可靠的智能巡检技术,赋能电力、管廊、工业园区等领域的智能化、无人化升级,助力更多智能巡检场景实现规模化落地。
【广告】本内容为广告,相关素材由广告主提供,广告主对本广告内容的真实性负责。本网发布目的在于传递更多信息,并不代表本网赞同其观点和对其真实性负责,广告内容仅供读者参考。

技术创新与场景价值双轮驱动,科大讯飞AI眼镜入选2026年度值得关注AIGC产品


